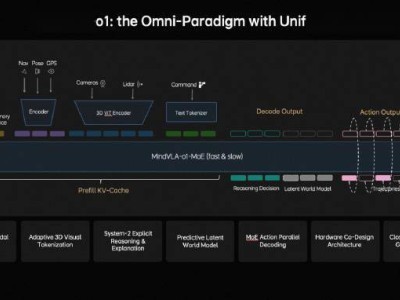
國星宇航與上海交通大學太空計算聯合實驗室近日宣布,成功完成一項突破性技術驗證——全球首次利用太空算力遠程操控地面機器人。該試驗基于開源智能體“龍蝦”OpenClaw,通過自然語言指令實現了“太空AI推理-地面執行”的完整閉環,標志著太空算力為硅基智能體提供認知服務的技術路徑正式打通。
試驗過程中,操作者以語音形式下達動作指令,OpenClaw系統將指令上傳至部署在衛星上的“星算”計劃01組太空計算中心。依托預先搭載的大模型,太空算力平臺在軌完成推理計算后,將決策結果實時回傳至地面終端。OpenClaw解析結果并精準控制人形機器人完成指定動作,整個過程跨越天地鏈路,響應延遲控制在秒級范圍內。
此次技術突破包含三項全球首創:首次驗證太空算力驅動地面機器人的可行性;首次構建“自然語言-太空推理-機械執行”的完整技術鏈條;首次將AI Token調用服務拓展至太空環境。研究團隊特別指出,太空算力服務突破了地理限制,理論上可實現全球任意地點機器人的實時操控,為極端環境作業、災害救援等場景提供了新型解決方案。
針對智能體安全難題,聯合實驗室提出太空算力防護體系。上海交通大學人工智能學院執行院長王延峰解釋,傳統地面智能體面臨“能力越強、風險越高”的悖論,而太空算力通過三重機制重構安全邊界:通信端采用軍用級加密協議確保數據傳輸零泄露;數據處理層實現原始數據不上公網、關鍵參數不可逆加密;物理層面則利用太空環境天然隔離地面網絡攻擊。這種“天地隔離”架構使智能體既能調用強大算力,又避免暴露核心數據。
據研發團隊透露,太空算力服務具有獨特應用優勢。當地面網絡癱瘓或算力資源不足時,部署在近地軌道的計算中心可為人形機器人、無人駕駛車輛等提供替代性AI支持。特別是在深海探測、極地科考等極端場景中,太空算力的低延遲特性使其成為地面基站的有效補充。目前,研究團隊正優化天地鏈路帶寬,計劃將控制精度提升至毫秒級。