在近期舉辦的英偉達GTC大會上,“物理AI”成為核心議題之一。這場科技盛會釋放出明確信號:人工智能的發(fā)展正從數(shù)字世界加速向現(xiàn)實空間延伸,物理AI被推至產業(yè)變革的前沿。英偉達將物理AI與自主智能體、AI工廠并列,作為大會三大主線,黃仁勛在主題演講中重點展示了機器人、仿真技術、世界模型及開放數(shù)據(jù)工廠等領域的突破,意圖推動AI從“計算工具”向“感知-決策-行動”一體化系統(tǒng)進化。
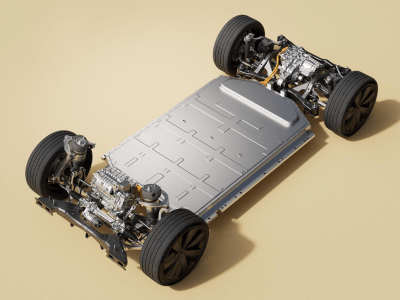
汽車行業(yè)成為這場變革的首個試驗場。英偉達此次發(fā)布的Isaac仿真框架、GR00T模型及數(shù)據(jù)工廠藍圖,均明確指向機器人、自動駕駛等現(xiàn)實場景應用。產業(yè)界形成共識:當AI系統(tǒng)需要應對開放道路的復雜變量時,其技術難度遠超封閉環(huán)境中的機器人——車輛每天在真實交通中運行,面臨海量動態(tài)場景與極低容錯率,這使其成為物理AI最嚴苛的驗證平臺。
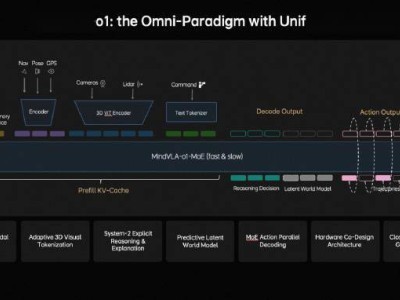
中國智能駕駛企業(yè)元戎啟行在大會上提出全新技術范式:以基座模型重構輔助駕駛系統(tǒng)。該公司CTO曹通易介紹,其研發(fā)的400億參數(shù)VLA(視覺-語言-動作)模型,將場景理解、決策規(guī)劃與安全評估整合為統(tǒng)一架構,替代傳統(tǒng)模塊化設計。這種“統(tǒng)一大腦”模式試圖解決行業(yè)痛點——過往系統(tǒng)因感知、規(guī)劃、控制模塊獨立運行,在復雜城市路況中常出現(xiàn)“看懂但未理解”“能動作但不可信”的問題。新架構通過統(tǒng)一認知底座,使系統(tǒng)先形成對物理世界的完整理解,再輸出駕駛行為。
該技術路徑選擇量產車作為切入點,目前已實現(xiàn)規(guī)模化數(shù)據(jù)閉環(huán)。據(jù)公開信息,搭載元戎啟行方案的量產車型交付量突破25萬輛,其數(shù)據(jù)更新周期壓縮至12小時。這種“從車到Robotaxi”的遷移邏輯,源于汽車行業(yè)的獨特優(yōu)勢:作為規(guī)模化硬件載體,車輛具備持續(xù)在線運行環(huán)境、海量真實場景數(shù)據(jù)及明確安全邊界,形成物理AI訓練的天然場域。英偉達的布局也印證這一趨勢——其Cosmos世界模型、開放數(shù)據(jù)工廠等方案,均圍繞自動駕駛長尾場景的仿真優(yōu)化展開。
這場變革正在重塑行業(yè)競爭格局。過去兩年,汽車AI領域的主導權主要掌握在特斯拉、英偉達等平臺型企業(yè)手中,中國廠商多聚焦于應用落地與成本優(yōu)化。元戎啟行此次提出的技術范式,試圖在底層架構層面重新定義自身角色:通過將輔助駕駛系統(tǒng)升維為物理AI基座模型,該公司不再局限于輔助駕駛供應商定位,而是試圖切入更廣闊的具身智能市場。這種戰(zhàn)略轉型的可行性,將取決于基座模型能否在安全一致性、責任界定等關鍵問題上通過量產驗證。
隨著物理AI從概念走向實踐,智能駕駛行業(yè)的競爭焦點正在轉移。功能覆蓋、高精地圖等傳統(tǒng)比拼維度逐漸退居次位,取而代之的是系統(tǒng)認知的統(tǒng)一性、模型的可遷移性及真實世界的學習能力。這場變革不僅關乎技術路線選擇,更預示著汽車產業(yè)從交通工具制造商向智能體運營商的角色蛻變。