在智能交通與智慧城市快速發展的今天,計算資源的實時調度與高效利用已成為推動自動駕駛與車聯網應用落地的核心挑戰之一。近日,微云全息推出一項具有顛覆性意義的創新成果——深度強化學習驅動的協作車輛邊緣計算(Collaborative Vehicular Edge Computing, CVEC)混合任務調度技術。該技術依托最先進的強化學習優化框架——Rainbow算法,在可行約束條件下實現動態車輛環境中的最優混合任務調度,以顯著降低計算卸載的綜合服務成本,并提升任務處理的實時性與穩定性。其不僅在學術和工程上均具有前沿價值,更有望在智能網聯汽車、自動駕駛協同感知、智慧交通管理、車載多媒體計算等領域廣泛應用,為未來的車路協同系統注入更高效的智能調度能力。
隨著自動駕駛、車聯網(V2X)以及智慧交通的快速普及,車輛逐漸具備了傳感、計算與通信的綜合能力。然而,自動駕駛算法、高清視頻處理、實時地圖構建、車載AI推理等任務對算力的需求持續攀升,單靠車輛自身的計算單元,往往難以滿足毫秒級響應的應用要求。為此,業界引入了協作車輛邊緣計算(CVEC)的理念,通過路側單元(RSU)的邊緣服務器以及周邊志愿者車輛,構建一個動態、可擴展的計算資源池,實現任務的分布式處理與高效卸載。
然而,CVEC環境下的任務調度存在多重挑戰。參與計算的處理節點(無論是RSU還是志愿者車輛)計算能力差異巨大,形成了異構算力環境;其次,車對車(V2V)與車對基礎設施(V2I)通信鏈路的時延與穩定性受車輛移動性影響顯著,導致卸載路徑與任務分配的動態變化;再次,任務的優先級、延遲敏感性、能耗要求等多種因素共同作用,使得傳統靜態調度算法難以兼顧全局最優與實時響應。
因此,深度強化學習(DRL)因其能夠在未知環境中通過交互式學習不斷優化決策策略,成為解決動態混合任務調度問題的理想方案。微云全息(NASDAQ:HOLO)在大量實驗與仿真基礎上,提出了結合Rainbow算法的深度強化學習框架,以突破傳統方法在收斂速度、策略穩定性以及多目標優化方面的瓶頸。
微云全息該混合任務調度技術的核心目標,是在考慮車輛移動性、任務優先級、延遲要求與能耗約束的前提下,最小化全局的綜合服務成本。綜合服務成本被定義為任務優先級值與處理延遲和能耗加權和的乘積,這一公式能夠有效反映任務在實際應用中的重要性與資源消耗情況。
在調度過程中,車輛可能選擇兩種主要卸載方式:
V2I卸載:請求者車輛將任務卸載至路側單元的邊緣服務器,適合高計算能力、低延遲需求的任務處理;
V2V卸載:請求者車輛將任務卸載至附近的志愿者車輛,適合短時空鄰近、計算量中等的任務執行。
為確保任務在嚴格的時延約束內完成,系統會根據車輛移動速度、相對位置、通信鏈路質量等動態因素,實時計算V2V和V2I的可用延遲閾值,從而約束調度決策的可行性。
Rainbow算法作為本系統的強化學習引擎,融合了多種DRL性能增強技術,包括雙重Q學習(Double Q-learning)、優先經驗回放(Prioritized Experience Replay)、分布式值函數(Distributional RL)、多步學習(n-step learning)、噪聲網絡(Noisy Nets)以及Dueling架構等。通過這一融合式改進,Rainbow能夠在復雜的CVEC環境中實現更快的收斂、更穩定的策略生成,并顯著提升對動態變化的適應能力。
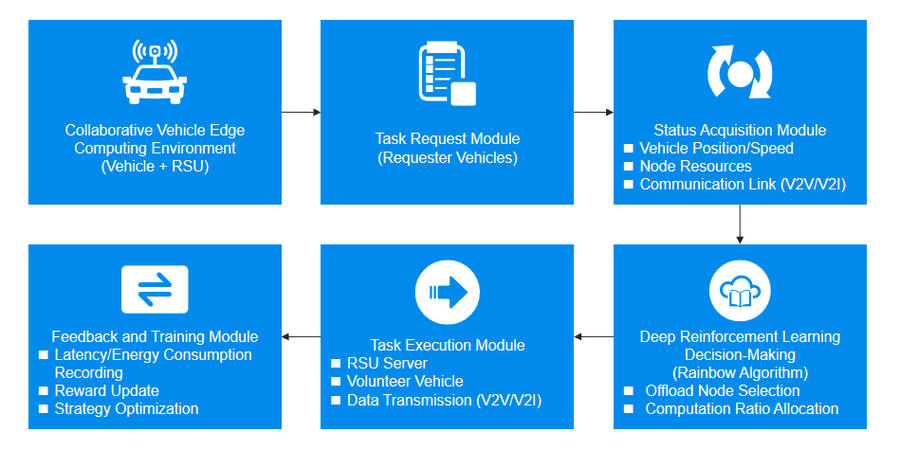
微云全息該系統首先將CVEC環境抽象為一個馬爾可夫決策過程(MDP),其中狀態空間包括車輛位置、速度、剩余計算任務量、鄰近可用處理節點的計算與通信特性等信息;動作空間對應不同的任務卸載決策,包括選擇目標處理節點、分配計算比例、選擇通信鏈路類型等;獎勵函數則基于服務成本公式構建,通過懲罰高延遲、高能耗或違背時延約束的行為,鼓勵系統選擇低成本、高效率的調度策略。
系統周期性收集環境狀態并輸入到Rainbow模型中,模型輸出當前最優的卸載策略。隨后,任務被分配到最合適的計算節點,并通過V2V或V2I鏈路進行數據傳輸。在任務完成后,系統會將延遲與能耗等反饋信息更新到經驗回放池中,并利用這些歷史經驗對Rainbow模型進行迭代優化,實現自適應的策略改進。
與傳統的深度Q網絡(DQN)不同,Rainbow在多個方面優化了學習過程。例如,分布式值函數能夠捕捉回報的不確定性分布,而不僅僅是期望值,從而讓調度策略在波動性較大的環境中更加穩健;優先經驗回放機制則確保模型優先學習那些對策略改進最有價值的經驗樣本,加速了收斂速度;而噪聲網絡的引入,則使模型能夠在訓練后期保持一定的探索性,避免陷入局部最優解。
隨著智能交通與車聯網產業的持續發展,車輛不僅是交通工具,更將成為分布式計算網絡中的重要節點。微云全息(NASDAQ:HOLO)深度強化學習驅動的混合任務調度技術,將在自動駕駛協同感知、智慧交通信號優化、車載娛樂與多媒體處理以及應急事件處理等多個領域釋放價值。
總體來看,微云全息該技術在協作車輛邊緣計算中的混合任務調度問題上展示了顯著的性能優勢,為動態環境下的資源優化提供了可行方案。未來,通過進一步的算法優化與模型訓練,有望在復雜多變的實際交通場景中實現更高效、穩定的調度效果,并為智能交通系統的持續發展提供技術支撐。