理想汽車創始人李想近日在社交平臺發布長文,深度剖析了自動駕駛領域長期存在的技術瓶頸,并首次公開了理想汽車在三維空間感知技術上的重大突破。他指出,當前行業普遍采用2D視覺數據訓練自動駕駛系統,這種模式如同讓AI僅通過行車記錄儀畫面理解復雜路況,難以構建完整的空間認知能力。
傳統技術路線中,BEV架構因缺失高度維度信息導致空間感知失真,而OCC方案雖能捕捉幾何結構卻無法解析語義內容。這種二維到三維的轉換缺陷,使得AI系統始終無法像人類駕駛員那樣,基于幼年時期形成的三維空間認知基礎進行安全決策。李想強調,這種技術范式的局限性正是制約自動駕駛發展的核心障礙。
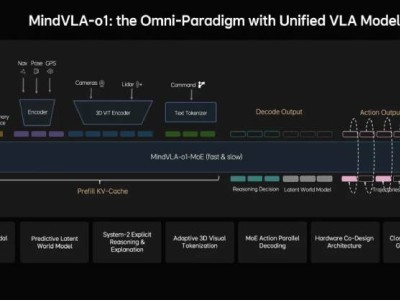
針對行業痛點,理想汽車研發團隊推出原生3D ViT視覺編碼器,該技術突破性地讓神經網絡直接在三維空間進行特征提取。通過同步處理幾何結構與語義信息,系統可實現500米范圍內的穩定環境感知,較傳統方案感知距離提升300%。配合自研馬赫芯片提供的算力支撐,激光雷達在該系統中轉型為高精度校準工具,顯著降低對硬件的依賴。
更值得關注的是MindVLA?o1多模態大模型的應用。該模型通過統一建模空間理解、決策推理和駕駛行為,使系統具備在隱空間模擬場景變化的能力。這種類人思考機制不僅提升了自動駕駛的決策質量,更展現出跨領域應用的潛力——李想透露,該技術架構已開始向機器人領域延伸,未來有望構建通用型物理世界智能體。
技術團隊通過大量對比實驗驗證,采用三維感知架構的系統在復雜路況下的決策準確率提升47%,異常場景響應速度縮短至0.3秒以內。目前該技術已進入實車測試階段,首批搭載車型預計將在年內完成路測驗證。這項突破不僅為自動駕駛開辟了新的技術路徑,更重新定義了AI與物理世界的交互方式。